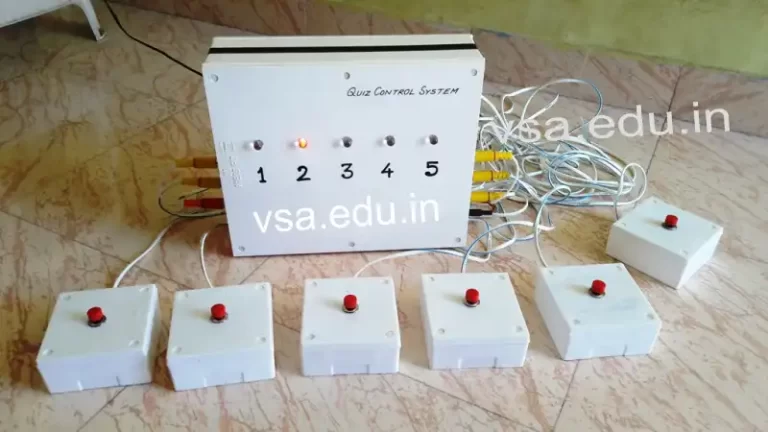
AR-AD3: Arduino based Fastest Figure First Controlling System for Quiz Competition
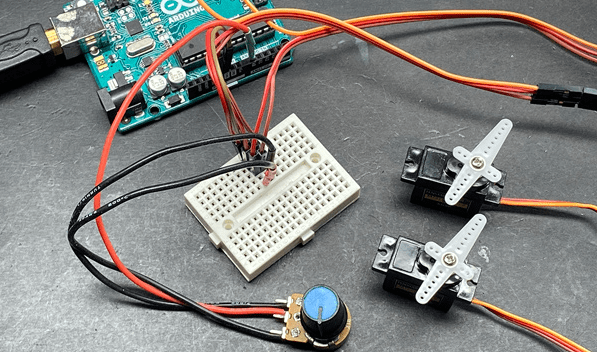
With this system we can detect the fastest finger first action in a quiz competition conducted in schools & colleges. For this project you require following components.