Arduino Alvik: How to write the blinking LED code?
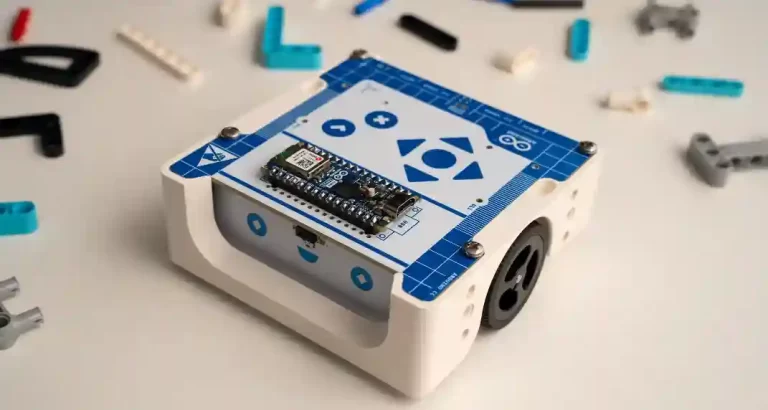
Simple code to blink the two LEDs - DL1 and DL2 given on top of Alvik Robot. These are multicolor LEDs and can be programmed to produce colorful effects.
The Arduino Alvik is a newly launched educational robot that supports various programming languages, including MicroPython. It is built on the Arduino Nano ESP32-S3 and designed to be a versatile tool for robotics education. This series contains all the codes for your Arduino Alvik robot.
Simple code to blink the two LEDs - DL1 and DL2 given on top of Alvik Robot. These are multicolor LEDs and can be programmed to produce colorful effects.
Let us see the code for two multicolor LEDs DL1 and DL2 on top of Alvik Robot to create a colorful effects.

This code explains how to move Alvik forward and backward. You can add colorful effect of LEDs while it is moving...

This code explains how to give accurate turns to your Alvik robot. You can modify it to create different motion effects to your Alvik robot.
Quite a simple black line follower code for Arduino Alvik with complete details of controlling the motors and giving turns...
It can adapt its speed accordingly and always knows its orientation - no matter how much you try and confuse it! It has a powerful six-axis accelerometer and gyroscope sensor, which allows you to detect and measure acceleration and angular velocity. Upload the code and enjoy…!

Alvik: Detecting Falling and Crashes (IMU) Corrected Code tested code for IMU data measurement for Arduino Alvik. The official code for IMU was faulty and now corrected by us...
If you are Arduino Alvik lover, then you must be wondering that how to use the color sensor in Alvik. This is because the there is no data or any code about color sensor, given on the official website of Arduino Alvik.
If you are Arduino Alvik lover, and using the different functions given in Arduino Alvik user guide, then you must have come across the drive() function. I am sure that you must have been confused that how to use this function with proper parameters in it to control the motion of the robot.